Sampling-based Contact-rich Motion Control
Abstract
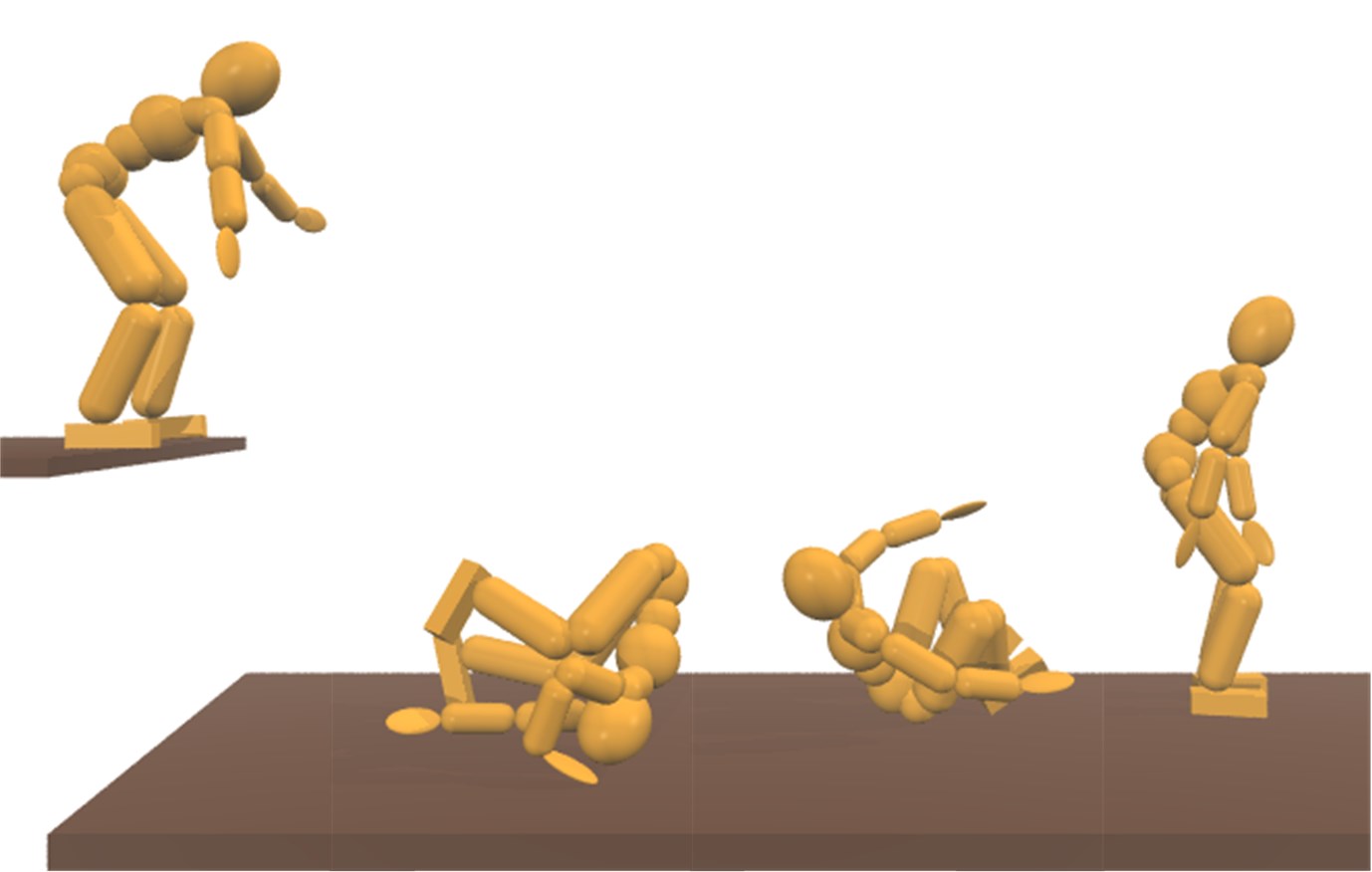
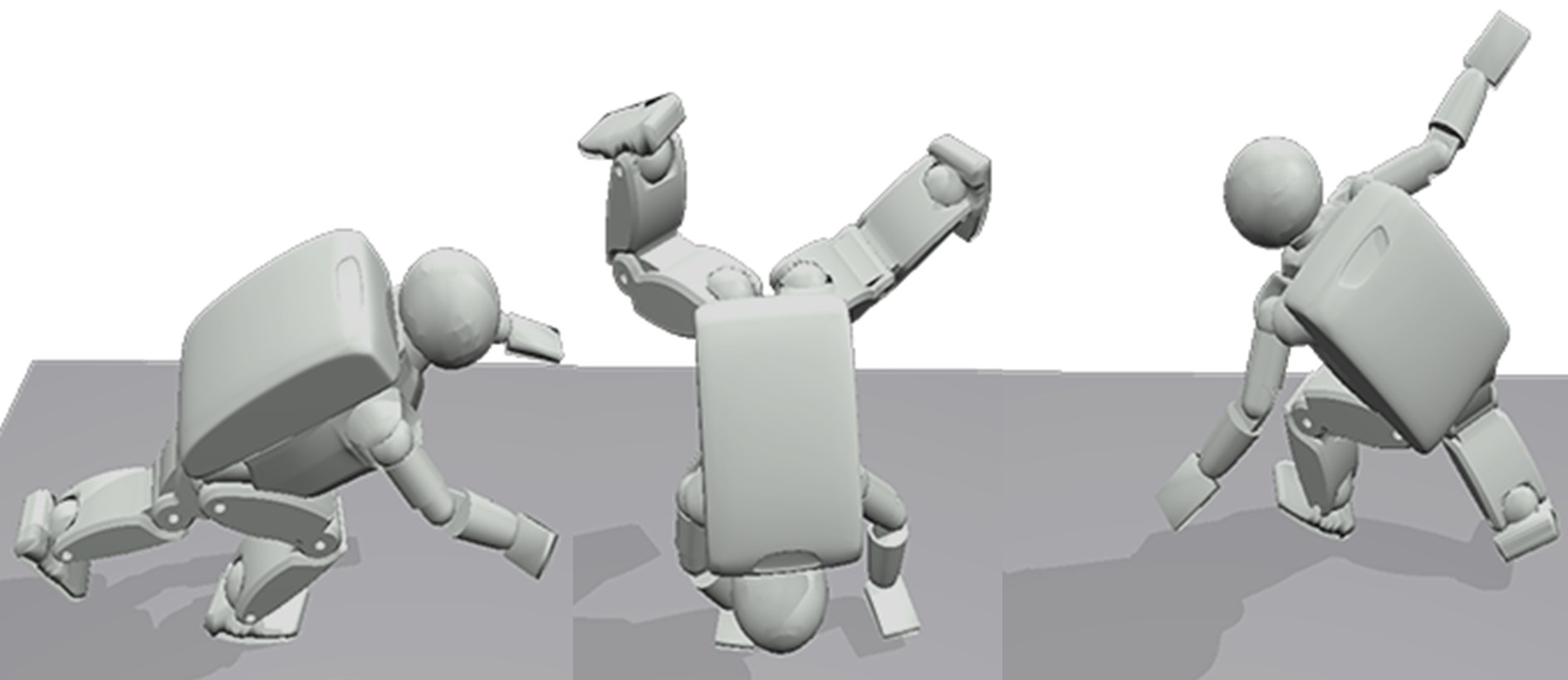
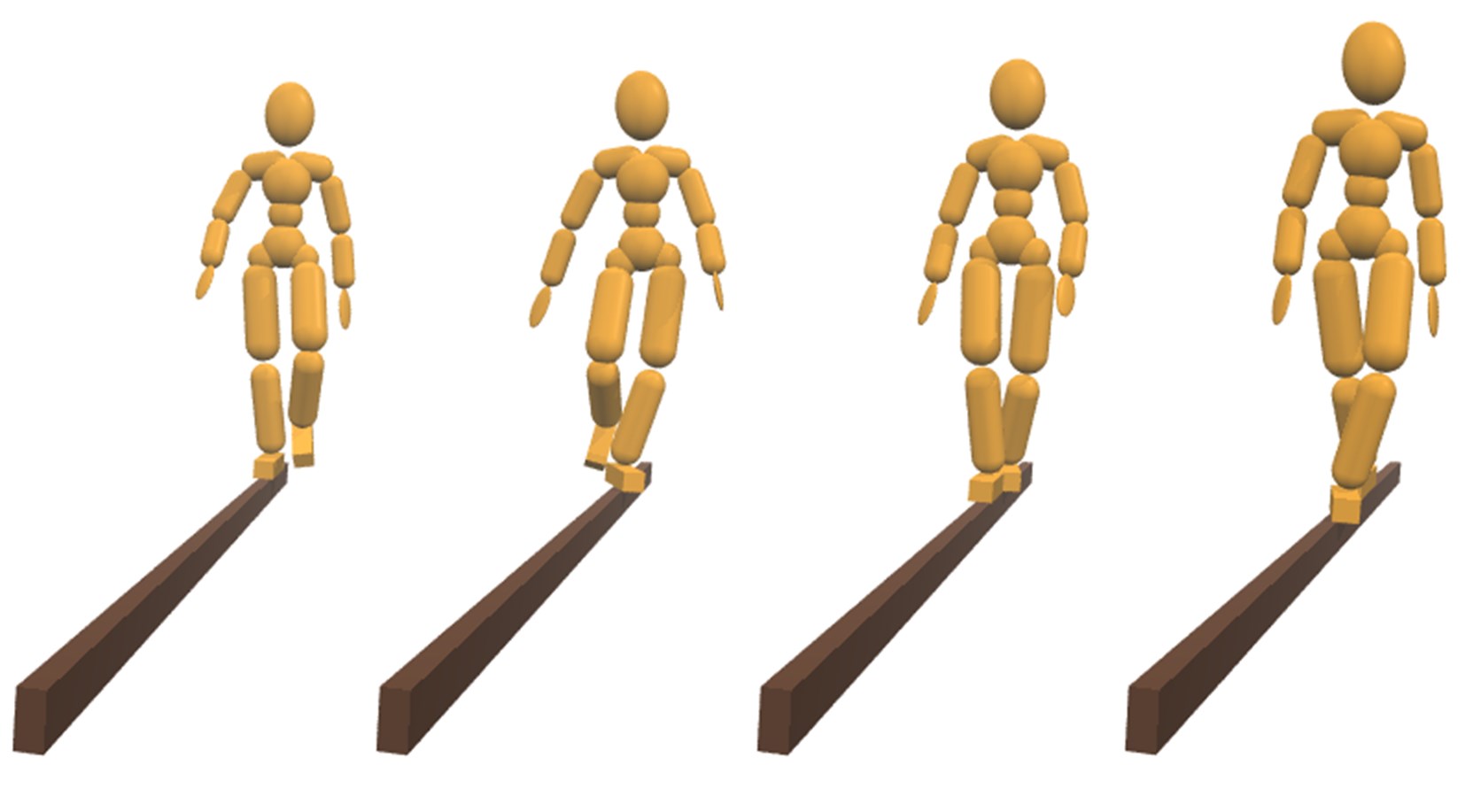
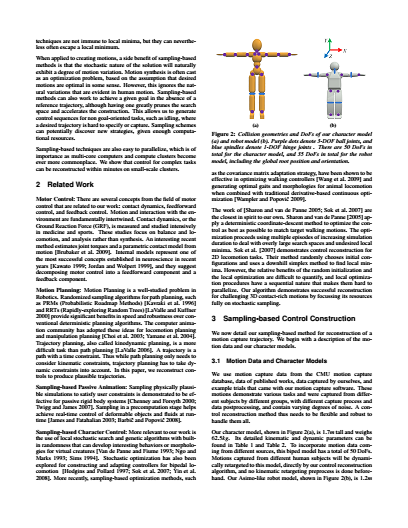
Human motions are the product of internal and external forces, but these forces are very difficult to measure in a general setting. Given a motion capture trajectory, we propose a method to reconstruct its open-loop control and the implicit contact forces. The method employs a strategy based on randomized sampling of the control within user-specified bounds, coupled with forward dynamics simulation. Sampling-based techniques are well suited to this task because of their lack of dependence on derivatives, which are difficult to estimate in contact-rich scenarios. They are also easy to parallelize, which we exploit in our implementation on a compute cluster. We demonstrate reconstruction of a diverse set of captured motions, including walking, running, and contact rich tasks such as rolls and kip-up jumps. We further show how the method can be applied to physically based motion transformation and retargeting, physically plausible motion variations, and reference-trajectory-free idling motions. Alongside the successes, we point out a number of limitations and directions for future work.
Video
Video 44.3MB (with audio)
Paper

Libin Liu, KangKang Yin, Michiel van de Panne, Tianjia Shao, and Weiwei Xu. 2010 Sampling-based Contact-rich Motion Control. ACM Trans. Graph. 29, 4 (SIGGRAPH 2010), Article 128, 10 pages. [PDF 5.9MB]
Bibtex
@article{Liu2010Samcon,
author = {Liu, Libin and Yin, KangKang and van de Panne, Michiel and Shao, Tianjia and Xu, Weiwei},
title = {Sampling-based contact-rich motion control},
journal = {ACM Trans. Graph.},
issue_date = {July 2010},
volume = {29},
number = {4},
month = jul,
year = {2010},
issn = {0730-0301},
pages = {128:1--128:10},
articleno = {128},
numpages = {10},
url = {http://doi.acm.org/10.1145/1778765.1778865},
doi = {10.1145/1778765.1778865},
acmid = {1778865},
publisher = {ACM},
address = {New York, NY, USA},
}