Simulation and Control of Skeleton-driven Soft Body Characters

Abstract
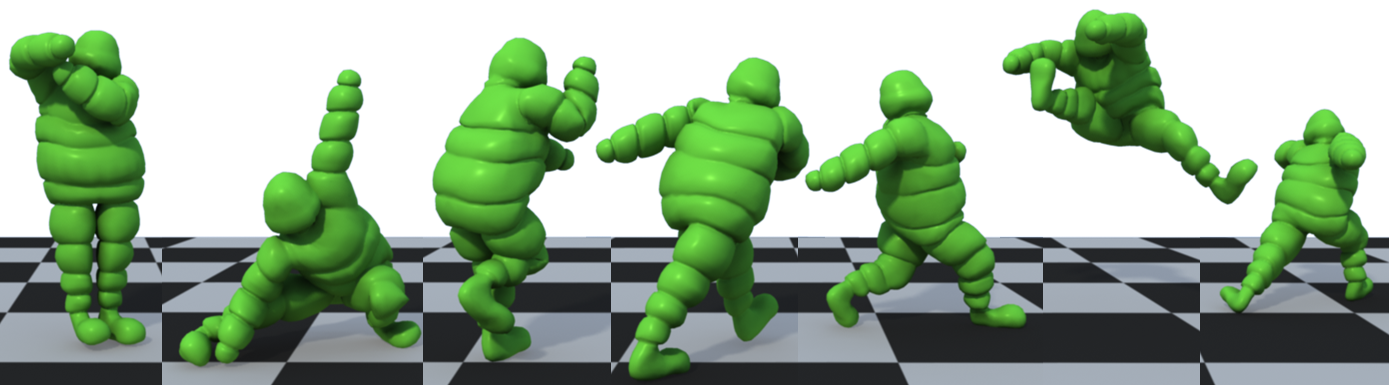
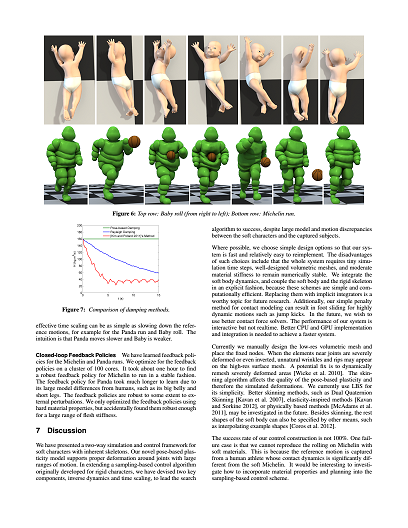
In this paper we present a physics-based framework for simulation and control of human-like skeleton-driven soft body characters. We couple the skeleton dynamics and the soft body dynamics to enable two-way interactions between the skeleton, the skin geometry, and the environment. We propose a novel pose-based plasticity model that extends the corotated linear elasticity model to achieve large skin deformation around joints. We further reconstruct controls from reference trajectories captured from human subjects by augmenting a sampling-based algorithm. We demonstrate the effectiveness of our framework by results not attainable with a simple combination of previous methods.
Video
Video 106MB
Paper



Libin Liu, KangKang Yin, Bin Wang, and Baining Guo. 2013. Simulation and Control of Skeleton-driven Soft Body Characters. ACM Trans. Graph. 32, 6 (SIGGRAPH Asia 2013), Article 215, 8 pages. [PDF 5.6MB]
Bibtex
@article{Liu2013SoftControl,
author = {Liu, Libin and Yin, KangKang and Wang, Bin and Guo, Baining},
title = {Simulation and Control of Skeleton-driven Soft Body Characters},
journal = {ACM Trans. Graph.},
issue_date = {November 2013},
volume = {32},
number = {6},
month = nov,
year = {2013},
issn = {0730-0301},
pages = {215:1--215:8},
articleno = {215},
numpages = {8},
url = {http://doi.acm.org/10.1145/2508363.2508427},
doi = {10.1145/2508363.2508427},
acmid = {2508427},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {finite element method, motion control, physics-based animation, plasticity model, soft body simulation},
}